CTT SIGMA - Robotique de Production
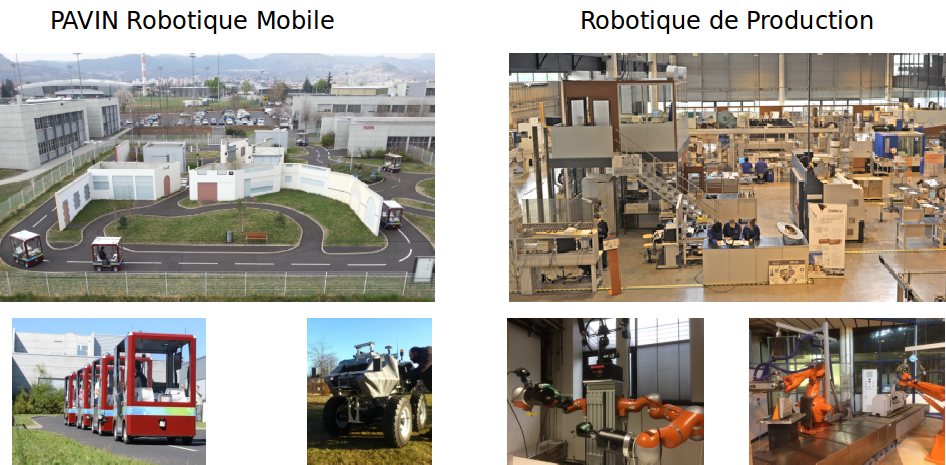
SIGMA Clermont dispose d’une plateforme technologique de haut niveau pour effectuer ses enseignements. Elle comprend des centres d’Usinage Grande Vitesse 4 et 5 axes, un centre de tournage-fraisage et des cellules robotisées pour l’usinage, le parachèvement et la manipulation d’objets.
La chaîne numérique complète depuis la Conception jusqu’à la Fabrication Assistée par Ordinateur en passant par la simulation et la métrologie est déployée, dans l’environnement CATIA V6 et CATIA V5 sur tous les postes de travail de la plateforme.
Enfin des matériels de métrologie et de mesures (mesure tridimensionnelle, rugosité et de topologie optique, mesure d’efforts et de vibrations…) permettent le contrôle des pièces fabriquées aussi bien que la compréhension des phénomènes physiques mis en jeu lors de la fabrication de pièces mécaniques.
Pour ce qui concerne le volet robotique de production de Robotex, deux plateformes ont pu être développées :
- la plateforme robotique d'usinage et de parachèvement multi-redondante,
- et la plateforme PRMDex (Plateforme Robotique pour la Manipulation Dextre).
PAVIN - Robotique Mobile
La plateforme PAVIN est un ensemble technique permettant de tester en vraie grandeur et en toute sécurité des véhicules autonomes circulant en milieu urbain. La plateforme est ainsi constituée d’un ensemble de rues et de carrefour de natures différentes, et d’une flotte de véhicules communicants (5 vipalabs) équipés de caméras, GPS différentiel et télémètres. PAVIN est également doublé par un modèle numérique permettant de simuler de façon réaliste cet espace d’évolution. Le projet Robotex a ainsi largement contribué à faire de la plateforme un pôle de qualité pour le développement d'applications de véhicules de transport intelligent.

